
Owen Carmichael, Ph.D.
Associate Professor and Director of Biomedical Imaging
Associate Professor and Director of Biomedical Imaging
During my first two years at CMU, I worked on the problem of automatically constructing 3D models of environments based on multiple, overlapping range images. I formulated a technique for tuning the general Spin Image technique of Johnson and Hebert to scenarios in which constraints on the motion of the range sensor between images are known beforehand.
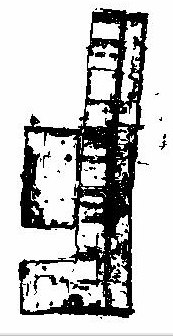
Below is a bird’s eye view of a 3D model of a building interior constructed using this technique. The model includes a long hallway and two rooms covering a 60 m by 20 m by 10 m area. We registered 32 partial, overlapping range images to each other and merged the registered scans together to build the model.
Publication:
Unconstrained Registration of Large 3D Point Sets for Complex Model Building, IROS 1998, [pdf, 495 K].
Video: This video on interior modeling (MPEG, 11 MB) summarizes the 3D model-building process.
Web sites:
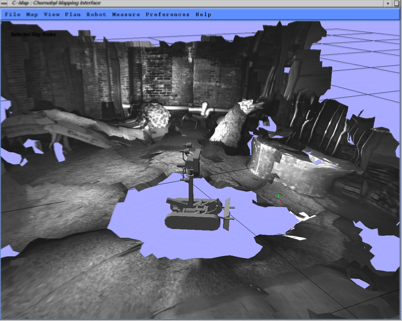
This algorithm was eventually incorporated into the 3D modeling engine used by the Pioneer robot to map portions of the Chernobyl nuclear reactor site. Below is an image from the Pioneer user interface. Pioneer has used its stereo vision system and our 3D modeling algorithms to build a 3D model of a mock-up of the Chernobyl site. The robot is shown in the center of the model surrounded by walls and various objects.
Publication:
Virtual Reality Mapping System for Chernobyl Accident Site Assessment. T.T. Blackmon, S. Thayer, J. Teza, V. Broz,J. Osborn, M. Hebert, et al. Proceedings of the SPIE, Vol. 3644, February, 1999, pp. 338-345.
Web Site: Pioneer web site.